




摘要:本文介绍了伺服系统实时控制的原理,详细解释了伺服如何实现实时控制。文章还提供了一份从入门到精通的12月学习指南,帮助读者逐步掌握伺服系统实时控制的技术。通过学习本文,读者可以更好地理解伺服系统的运行机制,提高实时控制的准确性和效率。
一、前言
随着工业自动化技术的飞速发展,伺服系统实时控制技术的应用越来越广泛,本文将带领初学者和进阶用户深入了解伺服系统实时控制的原理,并详细指导如何在实践中掌握这一技能,通过本文的学习,您将能够全面了解伺服系统的基础知识、掌握实时控制的原理和方法,并能在实际项目中应用。
二、了解伺服系统基础知识
伺服系统是一种能够精确控制位置、速度和加速度的系统,广泛应用于各种工业自动化设备中,伺服系统主要由控制器、驱动器、电机和执行机构等组成,了解伺服系统的基本构成和工作原理是掌握实时控制的基础。
三、伺服系统实时控制原理概述
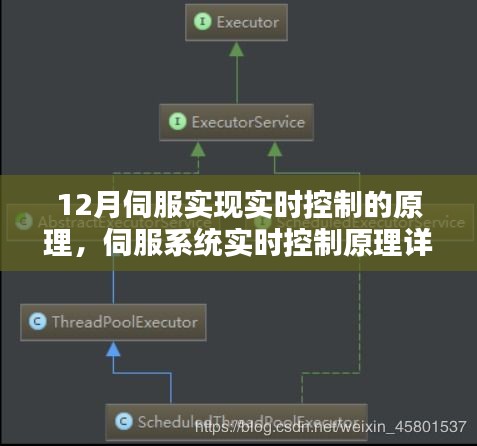
伺服系统的实时控制是指根据外部指令或输入信号,对电机进行快速而精确的控制,实现实时控制的关键在于控制器对输入信号的快速处理和对执行机构的精确控制。

四、实现伺服实时控制的步骤
1、确定控制目标:明确需要控制的对象及其运动要求,如位置、速度和加速度等。
2、选择合适的控制器:根据控制目标选择合适的控制器,如PLC、运动控制器或工业PC等。
3、配置控制器参数:根据实际需求配置控制器的参数,如采样周期、控制算法等。
4、编写控制程序:根据控制算法编写控制程序,实现对执行机构的精确控制。

5、调试与测试:在实际环境中调试控制程序,验证其性能和精度。
五、详细步骤及解释
1、确定控制目标:以一台需要精确位置控制的伺服电机为例,我们的目标是使电机能够跟随外部指令进行精确运动。
2、选择合适的控制器:根据实际需求选择适当的控制器,如使用运动控制器来实现复杂的运动控制。
3、配置控制器参数:在控制器中设置采样周期、控制算法等参数,采样周期决定了控制器对输入信号的响应速度,控制算法则决定了控制精度和响应速度之间的平衡。
4、编写控制程序:使用适当的编程语言(如Ladder Diagram、Function Block Diagram等)编写控制程序,程序应能够实现输入信号的处理、运动指令的生成以及执行机构的精确控制,示例代码如下:
// 伪代码示例,具体实现依赖于使用的控制器和编程语言
当接收到外部指令时:
计算目标位置和目标速度
生成运动指令发送给驱动器
等待一段时间(采样周期)
获取当前位置信息
比较实际位置与目标位置,计算误差值
根据误差值调整运动指令,实现精确控制5、调试与测试:在实际环境中进行调试和测试,验证控制程序的性能和精度,可以通过对比实际运动轨迹与期望轨迹,检查误差是否在允许范围内,调试过程中可能需要调整控制器参数或控制程序,以达到最佳效果,调试完成后,记录调试过程和结果,以便日后参考,调试过程中可能遇到的问题包括响应速度慢、精度不足等,解决方法包括调整控制器参数、优化控制算法等,通过不断调试和优化,您将逐渐掌握伺服系统实时控制的技能,经过一个月左右的实践和学习,您将能够熟练掌握伺服系统实时控制的原理和方法,在学习过程中,请务必注意理论与实践相结合,不断积累经验并解决问题,通过本文的引导和实践经验的积累,您将能够逐步从初学者成长为进阶用户甚至专家级人物,随着技术的不断进步和应用领域的拓展,伺服系统实时控制技术将继续发挥重要作用,希望本文能够帮助您在伺服系统实时控制的道路上迈出坚实的一步!
转载请注明来自上海伟信电子商务有限公司,本文标题:《伺服系统实时控制原理详解与12月学习指南,从入门到精通掌握实时控制技巧》
 蜀ICP备2022005971号-1
蜀ICP备2022005971号-1
还没有评论,来说两句吧...